Inductive position sensors (IPS) leverage Faraday’s law of electromagnetic induction to convert changes in magnetic fields into electrical signals. As the target object’s position changes, it alters the magnetic flux through a coil, inducing a voltage. An IPS typically includes a transmission (Tx) coil and three receiving (Rx) coils connected to an interface IC. The Tx coil generates an AC magnetic field that induces eddy currents in a metallic target, creating a secondary magnetic field detected by the Rx coils. The IC processes these signals to calculate the target’s position, ensuring accuracy by using signal ratios rather than absolute signal strength.
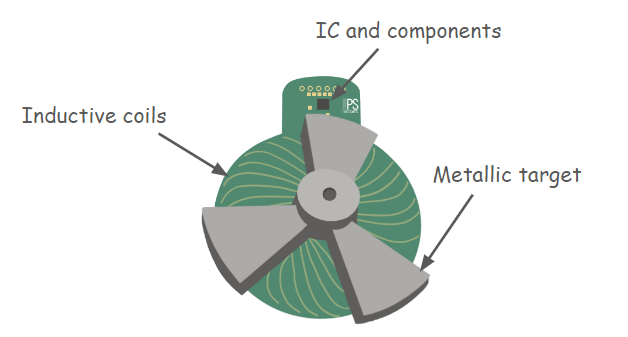
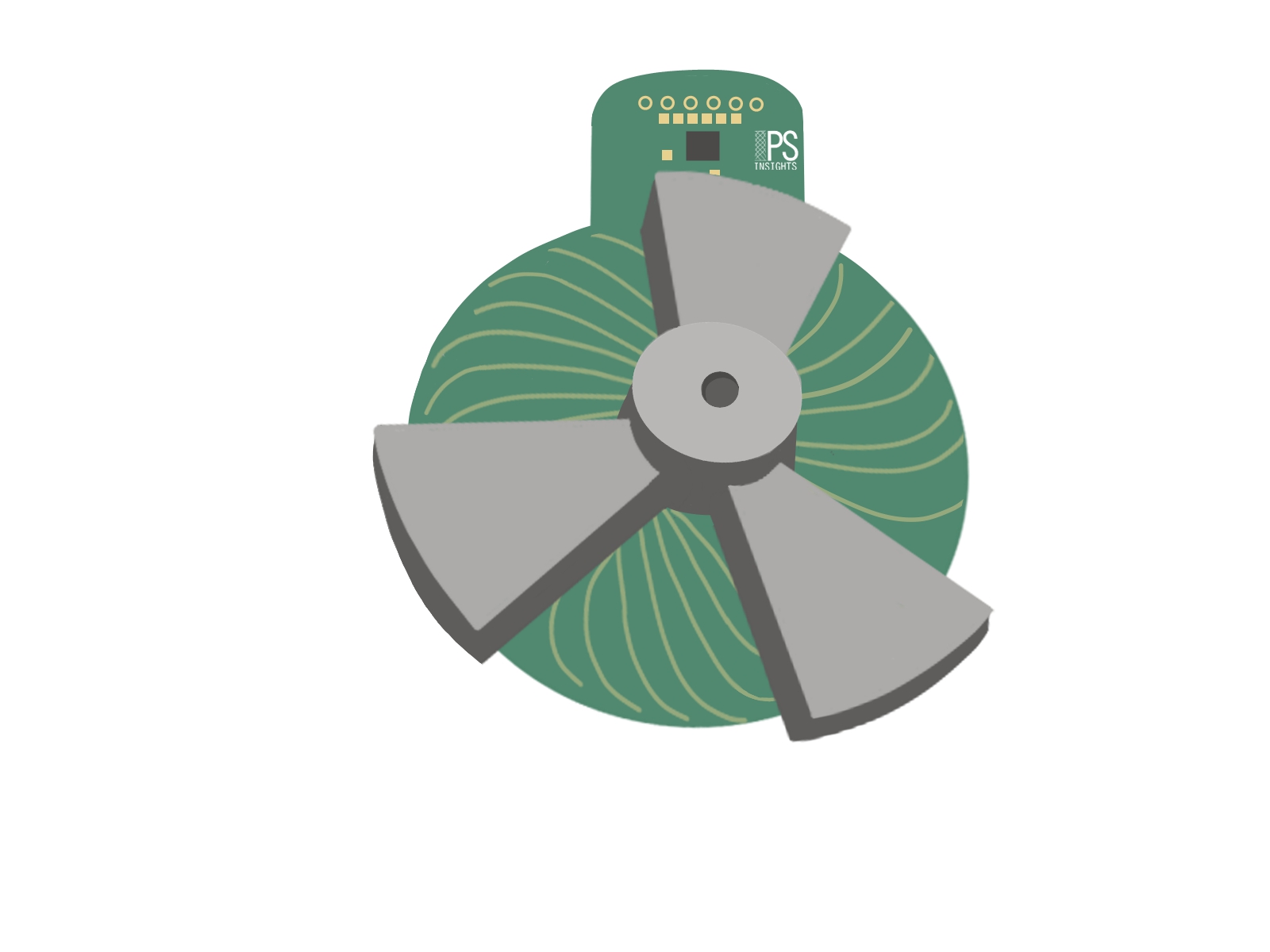
Figure 1. Inductive position sensor assembly
Figure 1 illustrates an inductive rotary position sensor equipped with a five-lobed target. This design specifies a range of 360°/3 = 120°. Within this range, the sensor outputs an angle varying from 0° to 360°. We define 120° as one electrical period, spanning 360° electrical: 1° = 3° electrical. Generally, if N is the number of lobes on the target, 1° = N° electrical. Other topologies, such as linear or arc sensors, are also possible. This study focuses on the example shown in Figure 1.
Transmitter Coil (Tx Coil):
- The Tx coil is a multi-turn circular coil. Its diameter and number of turns determine its inductance.
- It achieves resonance through a pair of capacitors, tuned to a frequency between 2 and 5 MHz.
Receiver Coils (Rx Coils):
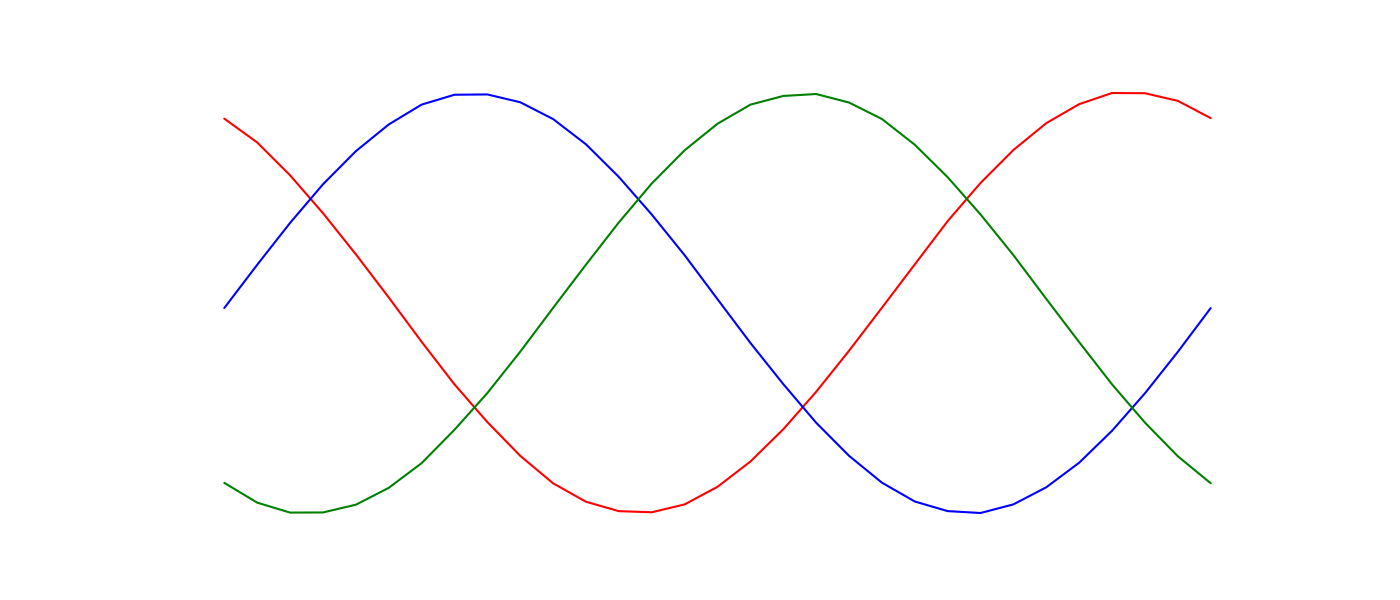
- The Rx coil set consists of three independent coils designed to produce a three-phase signal that matches the target’s periodicity.
- The design process involves several steps:
- Primitive function definition : Define a primitive function that describes the basic path p(α) of the receiving coil represented as r(θ) = B + A·sin(θ). Here, A and B are constants determined by system dimensions, and θ represents the angle ranging from 0 to 360°.
- Rx coil basic path definition : Project the primitive function into polar coordinates, adapting it to the sensor periodicity, as per formulas below:
x = p(Nθ)×cos(θ)
y = p(Nθ)×sin(θ)
- Tx-Rx coupling removal : The Rx coil as per the path defined above would exhibit non-zero coupling with the Tx coils. However, the objective is to achieve electromagnetic coupling only in the presence of the target. To accomplish this we connect in series the path already obtained with a second path. This path is an exact replica of the first path but rotated by 180° electrical, generating an opposite coupling and, consequently, overall zero coupling with the transmission coil.
- Complete the design : Replicate the Rx coil achieved above two times, shifting them by 120° electrical and 240° electrical to obtain the full set of Rx coils. Add the Tx coil and the target.